บ้าน
เกี่ยวกับเรา
รายละเอียด บริษัท
ทัวร์โรงงาน
ควบคุมคุณภาพ
ผลิตภัณฑ์
วาล์วควบคุมปนูเมติก
rotary plug control valve
3 way pneumatic valve
pneumatic speed control valve
วาล์วควบคุมไฟฟ้า
electric pinch valve
hydraulic pressure control valve
electric hydraulic control valve
วาล์วลดความดัน
วาล์วลดแรงดันที่ดำเนินการด้วยตนเอง
กลับควบคุมความดันฟิชเชอร์บรรเทาวาล์ว
back pressure regulator
เครื่องมืออุตสาหกรรม
การวัดระดับของของเหลว ถังเก็บน้ํามัน
เครื่องส่งระดับราดาร์ 80GHz
ระบบควบคุม Dcs
ระบบควบคุม IP20 DCS
ระบบควบคุมกระจายตัว Deltav ซีรีย์ S
ระบบควบคุมกระจายของ Deltav ซีรี่ย์ M
เซฟตี้วาล์ว
PN10 วัลล์วช่วยความปลอดภัย
วาล์วควบคุมไฟฟ้าช่อง 14 มม
A351 CF8M แวลฟ์ช่วยความปลอดภัย
อุปกรณ์เสริมวาล์ว
ฟิชเชอร์วาล์ว positioner ฟิชเชอร์นิวเมติก positioner
อุปกรณ์ไฮโดรลิควาล์ว
hydraulic valve accessories
อื่นๆ
แขนหุ่นยนต์วางพาเลท
แขนหุ่นยนต์อุตสาหกรรม
มือหุ่นยนต์ Kuka
วิดีโอ
ข่าว
ติดต่อเรา
ขออ้าง
English
Français
Deutsch
Italiano
Русский
Español
Português
Nederlandse
ελληνικά
日本語
한국
العربية
Türkçe
Indonesia
Tiếng Việt
ไทย
中文
ขอโทษครับ สินค้านี้ไม่ได้ขายแล้ว
ลองดูว่ามีสินค้าที่เกี่ยวข้องอะไรบ้าง ที่คุณสนใจ
สินค้าที่แนะนํา
อุตสาหกรรมน้ํามันและก๊าซ ปนิวเมติกแวลล์ Positioner Fish-er DVC2000 DVC6200 และ FOXBORO กํากับและ Spirax Sarco แวลล์ KE73 และ Actuator PN9223E
วาล์วควบคุมนิวแมติกใหม่และเชื่อถือได้ Spiraxsarco และ FISH-ER Regulator 67DFR และคอนโทรลเลอร์ DVC2000 3582I และ Masoneilan Positioner SVI2
Spiraxsarco วาล์วควบคุมนิวเมติกและ Masoneilan SVI2 วาล์วควบคุม Positioner และที่เชื่อถือได้ 4700E Electro-pneumatic Controller และ FOXBORO Positioner SRD991
Keystone Double Eccentric Butterfly Control Valve ด้วยการออกแบบกระเป๋ากระเป๋ากระเป๋ากระเป๋ากระเป๋ากระเป๋ากระเป๋ากระเป๋ากระเป๋า
AUMA SA Multi-Turn Electric Actuator กับ 10Nm-32000Nm Torque Range ป้องกัน IP68 และความเหมาะสมกับวาล์วกระพริก Keystone
วาล์วควบคุมนิวเมติก Samson และ Masoneilan SVI2 ตัวกำหนดตำแหน่งวาล์วควบคุมดิจิตอลอัจฉริยะและตัวควบคุมนิวเมติกไฟฟ้า 4700E ที่เชื่อถือได้และ Samson 3730-3
เครื่องตั้งระดับวาล์วแซมซอน ของเยอรมนีใหม่ แท้ ซัพพลายเออร์ ซัมซอน 3730-3 3730-4 3730-6 3725 4763 3766
ใหม่ SAMSON 3730 สมาร์ทวาล์ว Positioner 3730-3 3730-4 Positioner 3277 ตัวกระตุ้นนิวเมติก Samson ควบคุมวาล์วผู้ผลิตเดิม
แบรนด์นิวอริจินัลเยอรมนี ซามสัน 3241 วาล์วควบคุม 3725 วาล์ววางตําแหน่ง 3277 เครื่องขับเคลื่อนปนูเมติก
เครื่องตั้งแวลล์ไฟฟ้า 3725 เครื่องตั้งแวลล์ไฟฟ้า 3725 เครื่องตั้งแวลล์ไฟฟ้า 3730-3
เครื่องตั้งแวลล์ไฟฟ้า 3725 เครื่องตั้งแวลล์ไฟฟ้า 3725 เครื่องตั้งแวลล์ไฟฟ้า 3730-3
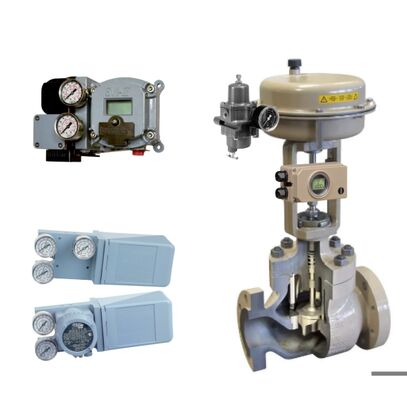
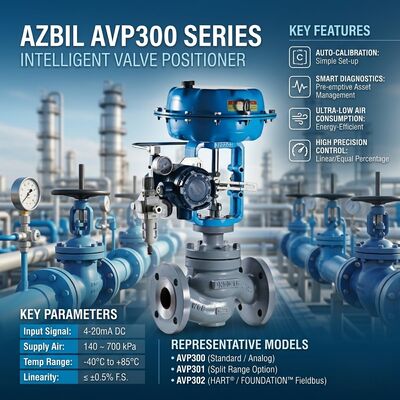
เครื่องตั้งตําแหน่งวาล์วสมาร์ทซีรีส์ Azbil AVP300 พร้อมการสื่อสาร HART 4-20 mA สัญญาณเข้าและความสามารถในการตั้งค่าอัตโนมัติ
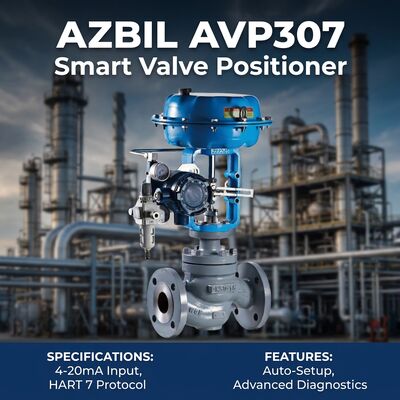
Azbil AVP307 Digital HART Pneumatic Valve Positioner พร้อม 4-20 mA DC Input และความแม่นยํา F.S. ± 1.0%
Azbil AVP300 Smart Valve Positioner พร้อมการสื่อสาร HART6 สัญญาณเข้าแบบ DC 4-20 mA และความแม่นยํา ± 1.0% F.S สําหรับวาล์วควบคุมแบบปนูเมติก
Azbil AVP307 ตัวกำหนดตำแหน่งวาล์วดิจิตอลพร้อมการสื่อสาร HART อินพุต DC 4-20 mA และตัวเครื่อง IP65
Azbil AVP307 เครื่องตั้งตําแหน่งวาลล์ปนิวเมติกดิจิตอล พร้อมการควบคุมไมโครโพเซสเซอร์การสื่อสาร HART และการป้องกัน IP66
คุณภาพสูง Foxboro SRD960 Smart Valve Positioner กับ Shanghai Lanlin ปานควบคุมปนิวเมติก
วาล์วควบคุม Wuzhong กับ Valmet Me-sto Neles ND7000 Smart Control Valve Positioner และ ASCO Solenoid Valve
วาล์วควบคุม SUPCON พร้อมตัวกำหนดตำแหน่งวาล์วดิจิตอลอัจฉริยะ Foxboro SRD991 และโซลินอยด์วาล์ว ASCO
ซุปคอน วาล์วควบคุมกับ Foxboro SRD991 เครื่องวางตําแหน่งวาล์วฉลาดใหม่สําหรับอุตสาหกรรมอัตโนมัติ